构建OS镜像使用指导¶
本章节内容会介绍 oebuild 的具体使用方法,可根据下述步骤,了解 oebuild 的相关命令并掌握如何构建定制化的 openEuler Embedded 镜像。
Note
在开始构建前,请确保构建主机满足以下条件:
至少有 50G 以上的空闲磁盘空间,建议预留尽可能多的空间,有助于运行多个镜像构建,通过重复构建提升效率。
至少有 8G 内存,建议使用内存、CPU数量更多的机器,增加构建速度。
第 1 步: 初始化工作目录¶
oebuild 的工作目录与 openEuler Embedded 版本是相关联的,构建不同版本的 openEuler Embedded,需要创建相对应的工作目录。 因此,推荐以openEuler Embedded版本号命名工作目录,例如 workdir_master。当前,可以通过执行以下命令,创建工作目录:
oebuild init [-u URL] [-b BRANCH] [DIRECTORY]-u <URL>:yocot-meta-openeuler 仓库地址,默认为 yocto-meta-openeuler。-b <BRANCH>:yocot-meta-openeuler 版本分支,默认为 master。 如需构建其它版本,直接使用该参数指定对应分支,例如:-b openEuler-22.03-LTS-SP2。<DIRECTORY>:需要创建的工作目录。注意,要确保当前用户拥有当前目录的读写权限,否则会报错:Permission denied;且不能指定当前目录中已有的目录,否则会报错:mkdir <directory> failed。
# 例如: # 初始化 master 版本的工作目录 $ oebuild init workdir_master # 初始化 openEuler-22.03-LTS-SP2 版本的工作目录 $ oebuild init -b openEuler-22.03-LTS-SP2 workdir_2203-sp2
成功创建工作目录后,切换到工作目录 执行以下命令,下载目标版本的项目源码及构建容器:
oebuild update
下载完成后,工作目录如下:
$ tree -L 1 workdir_master/ workdir_master/ ├── oebuild.log └── srcoebuild.log:oebuild 的操作日志。src:目标版本依赖的软件包源码目录,包括 yocto-meta-openeuler、yocto-poky等。后续构建所依赖的软件包也会自动下载到该目录,包括 kernel、busybox、systemd等等。
第 2 步: 创建定制化的构建配置文件¶
当前,openEuler Embedded 支持多种南向架构,包括 ARM/ARM64、X86_64、RISCV。在此基础上,oebuild 抽象封装了 openEuler Embedded 的大颗粒特性, 包括:混合部署(MICA)、图形、ROS、初始化服务(busybox or systemd)。用户可以通过 oebuild 自由组合所需特性,定制化 openEuler Embedded 版本。
在 oebuild 工作目录下,执行以下命令,创建定制化的构建配置文件:
oebuild generate -p PLATFORM [-f FEATURES] [-d DIRECTORY]-p <PLATFORM>:选择需要构建的目标机器类型。-f <FEATURES>:选择需要打开的特性,可多次指定 -f 打开多个特性。-d <DIRECTORY>:构建目录,用于存放构建产物,同一构建目录支持多次重复构建。当不输入任何参数时,会进入命令行菜单选择界面。
oebuild generate具体界面如下图所示:
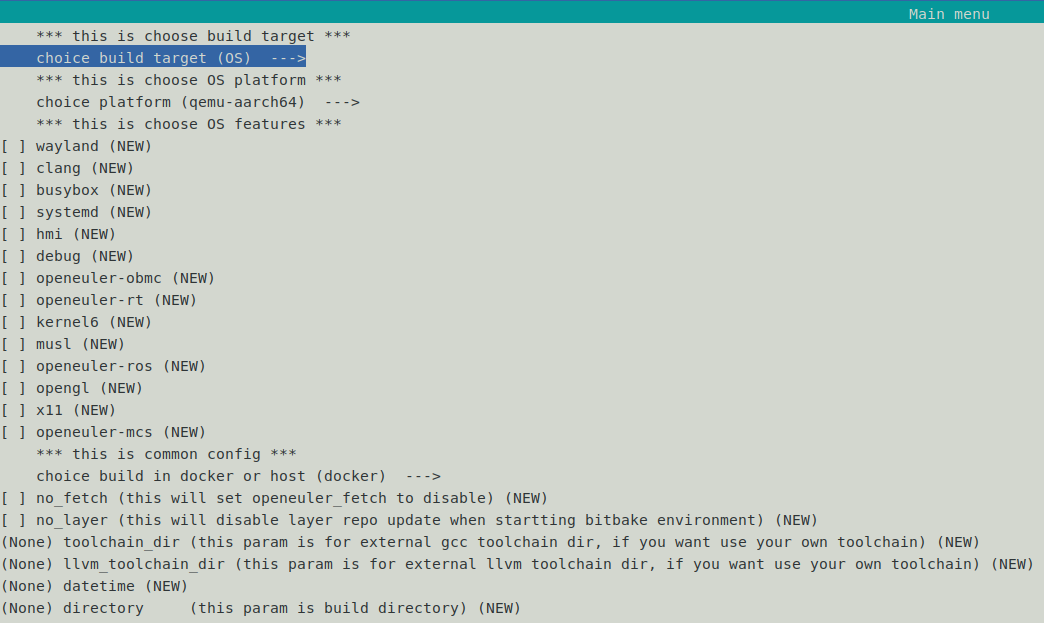
此时在”choice build target”中选择OS表示构建OS镜像,
在”choice platform”选择需要构建的单板,图中示例为qemu-aarch64
在”os features”下选择需要构建的特性
在directory输入编译目录名,至此按q,退出,按y确认即可生成编译目录
或者直接在命令行输入命令
# 例如: # 创建支持混合部署和systemd的 qemu-aarch64 镜像构建配置文件,构建目录为 build_arm64-mcs-systemd: $ oebuild generate -p qemu-aarch64 -f openeuler-mcs -f systemd -d build_arm64-mcs-systemd # 创建支持软实时和systemd的 x86-64 镜像构建配置文件,构建目录为 build_x86-rt-systemd: $ oebuild generate -p x86-64 -f openeuler-rt -f systemd -d build_x86-rt-systemd
执行成功后,会在 oebuild 的工作目录下创建出 build 目录,该目录包含多个用户定制的镜像构建目录,如:
$ tree build/ build/ ├── build_arm64-mcs-systemd │ └── compile.yaml └── build_x86-rt-systemd └── compile.yaml
不同目录下的 compile.yaml 为对应的构建配置文件。
Note
- 在具体的镜像构建目录
<DIRECTORY>下,可以重复触发构建,包括单个软件包的构建和镜像构建。 针对单个构建目录
<DIRECTORY>,支持重复使用oebuild generate -d <DIRECTORY>创建新的配置文件,以复用构建缓存加速构建,但需要注意:- 一个目录对应一个
PLATFORM,即上一次使用-p x86-64 -d build_dir创建出来的构建目录 build_dir,重新使用-p qemu-aarch64 -d build_dir,也无法复用上一次的构建缓存。 - 新增特性后,需要删除构建目录
<DIRECTORY>下的conf文件夹再进行构建。因为当 conf 存在时,不会再根据 oebuild 创建的 compile.yaml 重新生成 conf,新增特性无法生效。例如,上一次使用-f systemd -d build_dir在 build_dir 下创建了配置文件并完成了构建,希望重新使用-f busybox -d build_dir变更特性,需要同步删除 build_dir 下的 conf 文件夹,才能构建 busybox 镜像。
第 3 步: 构建 openEuler Embedded¶
在 compile.yaml 的同级目录 (即第二步创建出来的构建目录)下,执行以下命令,开始构建:
# 进入构建容器
$ oebuild bitbake
8<-------- 进入容器环境 --------
# 构建 openEuler Embedded 镜像
$ bitbake openeuler-image
$ 构建 openEuler Embedded 的 SDK
$ bitbake openeuler-image -c do_populate_sdk
# 构建完成后,退出容器环境
$ exit
8<-------- 返回构建主机 --------
# 在 output 目录中可以找到构建镜像
$ cd output/<构建时间戳>
See also
进入容器后,bitbake 的使用方法与 yocto 保持一致,一些常用命令如下:
bitbake <target> -c cleansstate:清理 <target> 的构建缓存,一般在重新构建 <target> 之前执行,以防止缓存影响新增的修改。bitbake <target> -e > env.log:输出关于 <target> 相关的构建环境变量到 env.log 中,一般用于帮助开发人员编写 <target> 的构建配方。bitbake <target> -g:输出 <target> 相关的构建依赖分析 pn-buildlist、task-depends.dot。
关于 bitbake 命令更详细丰富的用法,请参考 yocto bitbake manual。
进一步了解¶
经过上述步骤,您已了解如何使用 oebuild 创建定制化的 openEuler Embedded 镜像配置,以及如何构建 openEuler Embedded 版本。推荐您继续阅读以下章节内容:
- 了解 openEuler Embedded SDK 的使用方法,如何用 SDK 快速构建内核模块和用户态程序。
- 了解 openEuler Embedded 如何在不同的硬件平台上部署。
- 了解openEuler Embedded 正在进行的一些技术探索,参与社区的大颗粒特性。
- 了解 oebuild 的其它功能,包括如何使用自定义的软件包版本基线(manifest)、自定义的构建工具链构建 openEuler Embedded。